
Experimental DI machine waste of time?
I designed a very small electronically controlled automatic dice thrower that can be built for <$100. It uses a very simple electro-mechanical mechanism to lob the dice, in what I believe robe a very consistent manner, onto a small, desktop sized practice area with rubber backing+felt. A camera snaps a photo of the dice as they land, and feeds them to software program that accurately counts the pips.
A human needs to reset the throw mechanism and clear the dice as I haven't thought of a good way to do that automatically.
The purpose is not to 100% replicate a craps environment, but rather the outcome of machine thrown dice against a rubber backing, and comparing the results of set throws -vs- expected random outcome.
I feel like I've skimmed a lot of threads discussing such a scenerio, but I'm not sure how many throws it would take to get statistically significant data, or if such a experiment would result in any useful or interesting data.
We already know that dice are deterministic on a normal throw on a normal surface but you introducing the proper craps table surfaces would be very interesting because you could show if the table effectively defeats any attempt of any plausible precision.
Quote: DeMangoA lot of people have been down this road, several threads in fact. You, the human, throws the dice. No one can exactly duplicate their throw. Every table has different bounce characteristics. No casino will let you put said machine on the table or on the rail. Your road just dead ended.
I understand the machine (hopefully) throws more consistently than a human. But that's not the point of the experiment. The idea is to test whether or not the inditial state of the dice have any effect on the outcome of a roll.
Quote: DiscreteMaths2How many throws it takes will depend on how much you think your technique influences the dice. For the amount of control people claims exist I think a ballpark of 1,000 rolls would cover it pretty good. Although if you think it might just have a small impact it could take a lot more throws than that.
We already know that dice are deterministic on a normal throw on a normal surface but you introducing the proper craps table surfaces would be very interesting because you could show if the table effectively defeats any attempt of any plausible precision.
Interesting, so people have spent the time to create a dice throwing machine, but never threw them against a rubber craps table backing and had them land on a felt surface? If that's the case, or at least no one has done it publicly, I may continue.
If I tinker more I'll post a video, but the device uses a pinball coil that normally launches a ball, to push the dice off a small ramp. I imagine it's closer to completely consistent throes than a human could achieve
Quote: gamerfreakThe purpose is not to 100% replicate a craps environment, but rather the outcome of machine thrown dice against a rubber backing, and comparing the results of set throws -vs- expected random outcome.
Gamer,
Too cool! Pure research with no direct application (yet) to casino craps.
Lemmie see if I understand correctly: You set the dice in a consistent fashion, trigger the throw, and record the results. Then, you examine the results and determine whether observed data compares well or poorly with results expected from random data.
At the most basic level, just comparing observed and expected counts for each outcome (2 through 12) would be an easy first step. You may want to compare observed/expected 7s vs. non-7 rolls. Having fewer data "categories" (2 vs. 11) will more quickly show any actual, statistically significant difference.
But, the way you set the dice may not be best if you are trying to minimize the count of 7s vs. the expected count of 7s. Not to worry. With your data, you should be able to "back calculate" whether some different dice set might have shown greater divergence. Maybe use dice with two different colors, so you could track which die to set differently to improve your outcome.
As you get more and more data -- with dice set in a consistent manner each throw -- it should be easy to calculate the likelihood of a statistically significant difference. Not sure if your research will have any practical application in the casino, but it sure sounds like a lot of fun if you enjoy this kind of data analysis. As you have data to share, please feel free to post it. I'm sure the statistics pros will help you analyze it up one side and down the other.
In terms of how the dice are set, my thinking is that since this is a dice experiment rather than a craps experiment, it would not matter how they are set as long as it's consistent through each trial (obviously). I'd be willing to set them any way that would be most interesting, though.
As far as colored dice go, since my plan is to collect all the data electronically, my computer program could differentiate the colors and tabulate the data accordingly if it was a worthwhile endeavor.
The probabilities of landing on any face approach the same value 1/n only for the large values of the initial rotational energy and a great number of die bounces on table x. In the limit case when x approaches infinity , the die throw can be considered as a chaotic process. This can be done in computer simulations but not in the real experiment when a die is thrown from the hand or the cup as due to the limitation of the initial energy the die can bounce only a few times. The dynamics of the die is also chaotic in the case of the die bouncing on the oscillating table."
In their experiment the dice were dropped from 60cm onto a cork tabletop.
http://kapitaniak.kdm.p.lodz.pl/papers/2012/Kapitaniak_Strzalko_Grabski_Kapitaniak.pdf
My hypothesis is that a legal craps throw and back wall strike provide enough dice bounces to make it effectively random but if you want to take the time you might be able to show there is still some influence possible under the right conditions.
Quote: gamerfreakI'd be willing to set them any way that would be most interesting, though.
As far as colored dice go, since my plan is to collect all the data electronically, my computer program could differentiate the colors and tabulate the data accordingly if it was a worthwhile endeavor.
Set it hardways with different color dice. I'm interested in the results.
Quote: alphastormSet it hardways with different color dice. I'm interested in the results.
Alpha,
I'm all for that! As long as gamerfreak identifies the exact dice set and uses it exclusively, we can get some (possibly) interesting data about gamer's launcher device.
Ummm... Please describe the exact "hardways" set you would like gamer to use, OK?
I believe I've been shown more different "hardway" dice sets than there are dice sets total. Some promise to return hard doubles. Some avoid them. Some avoid sevens. Some favor inside numbers. Some so-called "hardway" dice sets are championed "because they work best," whatever that might mean in a given situation.
When I use my practice layout, I always use different colored dice, and the red die is always left-most in my set. Then, I record the results as a 2-digit number with the red die in 2nd position. For example: 56 or 65 as come-out winners and 12 or 21 as come-out losers. Of course, gamer may decide to record data differently.
It all sounds great! Good luck, gamerfreak!
Quote: DeMangoUntil you get a human to duplicate the machine that duplicates the human you will have a pile of useless data. Why does this crap come up every two years or so?
Why do you think it's useless?
If a machine throws dice and the outcome is not random, you'd have empirical evidence that dice control is possible. I've already said it 5 times or so, but this is not a craps experiment.
Quote: gamerfreakIf a machine throws dice and the outcome is not random, you'd have empirical evidence that dice control is possible. I've already said it 5 times or so, but this is not a craps experiment.
In theory, exerting identical forces on a pair of dice that start from the exact same state repetitively will yield the same result.
However, I'm willing to bet that a homebuilt machine is not precise enough and the room conditions not consistent enough to have much effect. Let us know what you find out.
People are saying it's useless because the concept can't be used to gain an advantage in craps, which is the context in which DI comes up on the forum.
Yes, you are clearly correct and it can even be constructed for about forty dollars using a fully assembled but rather small robotic arm and a Rasberry Pi chip set.Quote: DeMango. Your road just dead ended.
But don't rain on his parade. Its his dream. He believes in dice control because he wants to believe in it. Its like telling someone there ain't no UFOs much less is Elvis piloting one of them. You can do it till you are blue in the face, it don'g make no difference. He will still look skyward every night and await a visit from the Space Aliens.
He will always believe in dice control. He will never stop.
Quote: DeMangoUntil you get a human to duplicate the machine that duplicates the human you will have a pile of useless data. Why does this crap come up every two years or so?
DeMango, read the title to the durn thread, OK? It says this thread is a "waste of time" for anyone interested in gambling. This is "pure research with no direct application (yet) to casino craps," as I said in an earlier post.
Sit back. Watch. Enjoy us chasing our tails, while having fun. And, guess what? Ol' gamerfreak's new toy may actually generate predictable results once all the smoke clears. Or not. But, who cares? And, who knows where this little jaunt may lead us. Whoo-Hooo!
Quote: DeMangoLucky: Flea-Stiff said it all, above your post! I know where this leads: Booo-Hooo!
If it makes you feel any better, I've maybe spent 2hrs at a craps table, never had more than $20 down at one time, and never set the dice the whole 2 or 3 times I've thrown.
Quote: FleaStiffThen why on earth would you be interested in a dice throwing contraption? Makes as much sense as a tub of lard like me being interested in becoming a ballet dancer.
I skimmed through Wong on Dice and I'm skeptical at best and want to see some empirical data.
Quote: gamerfreakIf it makes you feel any better, I've maybe spent 2hrs at a craps table, never had more than $20 down at one time, and never set the dice the whole 2 or 3 times I've thrown.
Just messing with Lucky! We have met over a craps table!
That was kinda funny.Quote: DeMangoDo you have a Caps Lock detector?
-----------------------------------------
gamerfreak don't waste your time with anything DI related.
If it actually worked we would know about it by now, trust me.
Quote: AxelWolf... don't waste your time with anything DI related ...trust me.
Axel,
Don't you even read the title of the threads where you post? Trust me on this. It will keep you from continuing to flog a horse we all agree is dead. Gamer made it clear this thread is not DI related, and the thread title admits it is a waste of time. Believe me, a YUGE waste of time. But, a YUGE, fun waste of time, don'cher know?
I dunno why folks have such a problem with someone who wants to test his dice machine, a machine we all agree could never be used in a real casino. I think it will be somewhat of a miracle if gamer's dice machine delivers consistent results. But, I look forward to seeing the data.
I'm sure when we have a reasonable amount of raw data the many who have been ignoring the original post and overlooking the thread title will continue to harang thread readers with, "I told you so." But, that's what passes for polite conversation in so many of these threads, right?
craps is "10% skill and 90% mental", you know that someone who knows tons about
the DI scene is saying that there is no there, there.
What that means, since you say you want to get more "empirical data" about
this DI thing, is that you are going to find that you need to engineer your
throwing machine with a lot more sophistication than anything that has been
devised by numerous others who have attempted such. Many people who have
tried and practiced their toss mechanics to a very high level have essentially
failed time and time again. A machine without quite a bit of complex engineering
is still likely to find little to justify the effort put in. I would predict that
the effort in this regard will replicate the effort of practicing DI: each iteration
of an engineering tweak that will make the next round of toss results better able
to produce non-random results will not produce non-random results. It will either
cause you to quit or think of a new variable to implement in the way the device
operates in order to fix the trajectory, initial speed, landing zone, angle of
dice at landing, spin variables, surface effects, etc. In a sense you will simply
become a DI-wannabee by creating a robotic arm and software to do what the
DI-wannabees are already doing.
In short, your lack of experience in this area is showing...This project is almost
certain to be a rather long and complex, time-intensive slog without the golden fleece
ever in sight--since you can't play craps with a device.
However, there will be great interest if you eventually showed reproducible results
from a device that really worked. And the casinos will feel relief that the likelihood
of DI-wannabees being remotely so skilled, to the extent of such a device, is even more
negligible.
If you have a well-understood set of simple surfaces for the dice to hit and you had an ideal mechanical system then we would expect the outcome of your dice roll to be 100% reproducible. However, there will be several sources of variability in your real-life system from throw to throw:
1. Positional tolerances - there will almost certainly be differences in the position of the robotic hand (relative to the table) by microns (to tens or hundreds of microns) due to
- temperature changes from the heat generated by the robotic arm operation (mechanical expansion of metals can be significant even with only one degree of temperature rise)
- elastic and inelastic distortion of metals in the robot apparatus due to the stresses/forces involved in the operation.
- material flexure in the mounts that secure the robotic apparatus to your table/floor (not to mention finite movement of any table if you are operating on a table -a simple thing like your HVAC system turning on can effect a precision mechanical system.)
- if you have the option, perform the experiment on a concrete pad -like in a basement or garage - rather than on the 2nd floor of a wood frame structure. Remember that the ground itself will vibrate - and a big heavy concrete pad will minimize the effect of the vibrations on your experiment.
2. Dynamical differences in the motor that powers the throw. I'm guessing you understand this one - the conductance and capacitance of the wires in any electric motor will change with temperature and time leading to variations in the electromagnetic forces of the motor. The force of any electromagnetic motor is not reproducible from trial to trial with perfect precision.
3. Mechanical drag in the joints of the robotic arm (mostly with temperature - but, indeed, the temperature in the joints will be a function of how many times the arm has operated.)
4. Environmental factors: The humidity of the air in your "laboratory" could be a significant factor in determining air drag and should be well controlled - as well as air temperature.
Inevitably, there will be a small amount of mechanical variability in your system for tossing the dice.
Good luck with this and keep us apprised of results!
Quote: onebok... you say you want to get more "empirical data" about this DI thing ...
Really? Data about DI?? I don't think so. Here's what gamerfreak said:
Quote: gamerfreakThe purpose is not to 100% replicate a craps environment, but rather the outcome of machine thrown dice against a rubber backing, and comparing the results of set throws -vs- expected random outcome.
And, some of us hope gamer will share his raw data. Wholesome, crunchable raw data to test the dice machine.
Quote: onebokHowever, there will be great interest if you eventually showed reproducible results from a device that really worked.
I won't place any bets on it. But, whether or not gamer's dice machine generates "reproducable results," I'm looking forward to a fun journey, wherever the data take us.
Quote: gamerfreakI skimmed through Wong on Dice and I'm skeptical at best and want to see some empirical data.
Quote: gordonm888I have had a long career as a research engineer -so let me make a few comments for OP. ... Good luck with this and keep us apprised of results!
Many thanx for the great comments. Obviously, each of the parameters you discuss could affect the precision of repeated dice-machine "launches." Probably more work than it's worth to try to monitor all those sources of variance.
Do you know the realistic magnitude of the items you discussed? One to three percent? Or, 12 to 18 percent? How big a factor is all this?
Quote: gordonm888I have had a long career as a research engineer -including experiments with high-precision mechanical systems -so let me make a few comments for OP.
If you have a well-understood set of simple surfaces for the dice to hit and you had an ideal mechanical system then we would expect the outcome of your dice roll to be 100% reproducible. However, there will be several sources of variability in your real-life system from throw to throw:
1. Positional tolerances - there will almost certainly be differences in the position of the robotic hand (relative to the table) by microns (to tens or hundreds of microns) due to
- temperature changes from the heat generated by the robotic arm operation (mechanical expansion of metals can be significant even with only one degree of temperature rise)
- elastic and inelastic distortion of metals in the robot apparatus due to the stresses/forces involved in the operation.
- material flexure in the mounts that secure the robotic apparatus to your table/floor (not to mention finite movement of any table if you are operating on a table -a simple thing like your HVAC system turning on can effect a precision mechanical system.)
- if you have the option, perform the experiment on a concrete pad -like in a basement or garage - rather than on the 2nd floor of a wood frame structure. Remember that the ground itself will vibrate - and a big heavy concrete pad will minimize the effect of the vibrations on your experiment.
2. Dynamical differences in the motor that powers the throw. I'm guessing you understand this one - the conductance and capacitance of the wires in any electric motor will change with temperature and time leading to variations in the electromagnetic forces of the motor. The force of any electromagnetic motor is not reproducible from trial to trial with perfect precision.
3. Mechanical drag in the joints of the robotic arm (mostly with temperature - but, indeed, the temperature in the joints will be a function of how many times the arm has operated.)
4. Environmental factors: The humidity of the air in your "laboratory" could be a significant factor in determining air drag and should be well controlled - as well as air temperature.
Inevitably, there will be a small amount of mechanical variability in your system for tossing the dice.
Good luck with this and keep us apprised of results!
Thank you! Best reply so far. I imagined humidity would be the largest source of variation in the machine and throwing surface. My early prototype designs use MDF as a mounting surface, and any type of wood can expand or contract significantly under different humidity conditions. I will measure the humidity of the room when I attempt to produce workable data.
In terms of the other variables you mentioned, they may still come into play, but what I will say is that my device does not use a robotic arm as people have suggested, or any other type of electric motor/servo for that matter. The mechanism is entirely different.
The device design and any data collected will not be secret, I just have some more work to do before I want to post any photos/video.
Quote: onebokLuckyPhow please note:
Yes this is obviously inspired by craps and dice control, but the purpose of the experiment is to see if dice thrown against a diamond rubber backing is deterministic. That said, I won't be making any specific claims about the device I'm making or the data it produces. Everything will be made public, and you all can come to your own conclusions, and provide any advice/criticism/changes to the experiment.
Like I said originally, the purpose of this thread was to see if a this type of data could possibly be useful. Enough reputable posters have shown interest, so I think I will continue with my design. Stay tuned.
Quote: LuckyPhowMany thanx for the great comments. Obviously, each of the parameters you discuss could affect the precision of repeated dice-machine "launches." Probably more work than it's worth to try to monitor all those sources of variance.
Do you know the realistic magnitude of the items you discussed? One to three percent? Or, 12 to 18 percent? How big a factor is all this?
Honestly, its very difficult to guess the effects - and if OP does the test he will have measured the variance.
Quote: gamerfreakThank you! Best reply so far. I imagined humidity would be the largest source of variation in the machine and throwing surface. My early prototype designs use MDF as a mounting surface, and any type of wood can expand or contract significantly under different humidity conditions. I will measure the humidity of the room when I attempt to produce workable data.
Excellent. This has the potential to be interesting.
Quote: gamerfreak
In terms of the other variables you mentioned, they may still come into play, but what I will say is that my device does not use a robotic arm as people have suggested, or any other type of electric motor/servo for that matter. The mechanism is entirely different.
The device design and any data collected will not be secret, I just have some more work to do before I want to post any photos/video.
No electric motor/servo? Very mysterious. I wonder if you're using a simple electromagnet acting on a mechanical system with a fulcrum (like a see-saw.) I guess we'll just have to be patient and wait to learn more.
1) Dice control is possible -- this is a fact. Those arguing this fact simply don't realize that the only argument is what the parameters have to be in order for dice control to be possible. For example, if I drop a die from a robot one millimeter to the surface, I can completely control the dice. The argument is about what the parameters are for achieving dice control
2) Machines throwing dice more precisely is a red herring IMO. Even if you prove that it can be controlled over a long distance compared to a single person, you have not proven that the best robot can beat the best person. Certainly the best person can beat the worst robot, because I've built some shitty robots. But generally, they are ALL competitors, and there is no way to know if humans will be better than robots. Some people assume that robots are better because they haven't tried to build a robot that is better than they are. I believe that I have a better chance of performing DI than any robot that I have ever created. Still doesn't mean someone else can't build a better robot. And even if they did, that doesn't mean that a better person can't do better than that particular robot.
In order to make progress, you have to move on from the discussion of possible/impossible and begin the discussion on the effects of entropy at the release on entropy of the bounce. Until you get into that discussion, you're spinning your wheels. The correct way to proceed is by using natural intelligence and machine learning and computer vision along with 3d captures of dice bouncing and doing a ton of reverse CNN network learning with massive loads of data.
But the things that I have said in the past still apply. This is too much work for too little return because one thing remains a constant: any casino getting hit will change the rules to reduce their exposure. And that's the end.
ANYONE would be better off just taking chances at the Cromwell. Plus it's more fun.
If you want to man up bet bigger odds and spend less time arguing about stupid crap.
The end.
Once you find where this point is, then work from there
Quote: gordonm888No electric motor/servo? Very mysterious. I wonder if you're using a simple electromagnet acting on a mechanical system with a fulcrum (like a see-saw.) I guess we'll just have to be patient and wait to learn more.
Super close. I'm still waiting on some parts, and since Ahigh chimed in, I'll reveal the mechanism I'm using and hear out any more constructive criticism.
The mechanism is powered by a pinball coil to launch the dice off a short ramp, similar to this:
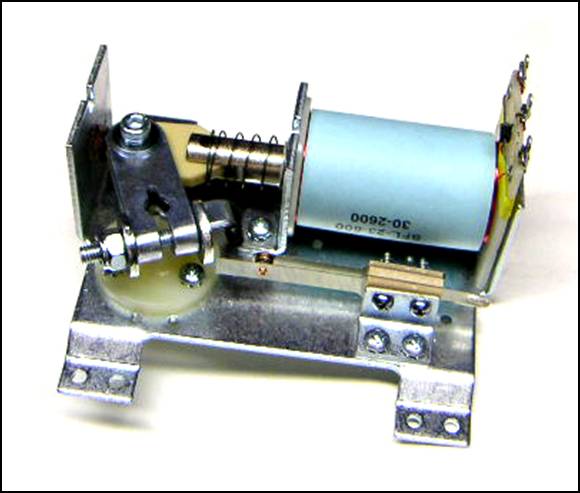
In my experience with pinball machines, these solenoid coils can exert a very consistent force over thousands times firing.
I'll also repeat that I have 0 expectation on using results from this experiment to profit in an actual craps game. Which I know sounds like a waste of time to the half of you, but not me.